Hello! My name is Mohammadreza Dindarloo, and I have recently started my PhD as a member of Dependable and Deployable AI for Robotics (CDT-D2AIR) at the University of Edinburgh.
Education Summary
PhD in CDT-D2AIR
Institution: University of Edinburgh
Years: 2025 - Present
M.Sc. in Control Engineering
Institution: K.N. Toosi University of Technology
Years: 2021 - 2024
B.Sc. in Electrical Engineering
Institution: K.N. Toosi University of Technology
Years: 2017 - 2021
A bit more about me
Beyond my research, I enjoy climbing, playing football, performing classical music, and exploring historical sites to learn about different cultures.Recent news
I am currently…
- Reviewing the literature to define my PhD research direction
Recently…
- I started my PhD as a member of Edinburgh Centre for Robotics
- I presented my paper titled “A Graph‑Based Self‑Calibration Technique for Cable‑Driven Robots with Sagging Cable” at IROS 2024 Conference.
- I defended my master’s thesis with a prfect grade. View Abstract
- A preclinical test of ARASH:ASiST, a dual-core training eye surgery robot, was conducted at Farabi hospital.
Research Highlights
ARASFactorSLAC
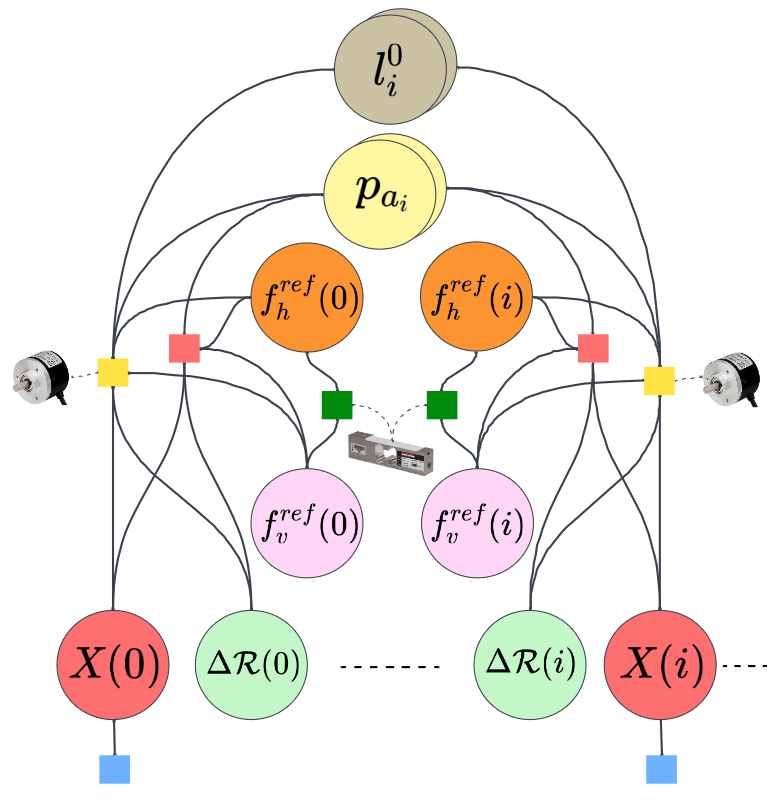
This project contains the implementation of a self-calibration and localization framework for Cable-Driven Parallel Robots (CDPRs) with sagging cables. This work is currently published in the IROS 2024 Conference as a oral pitch interaction presentation paper.
ARAStronaut
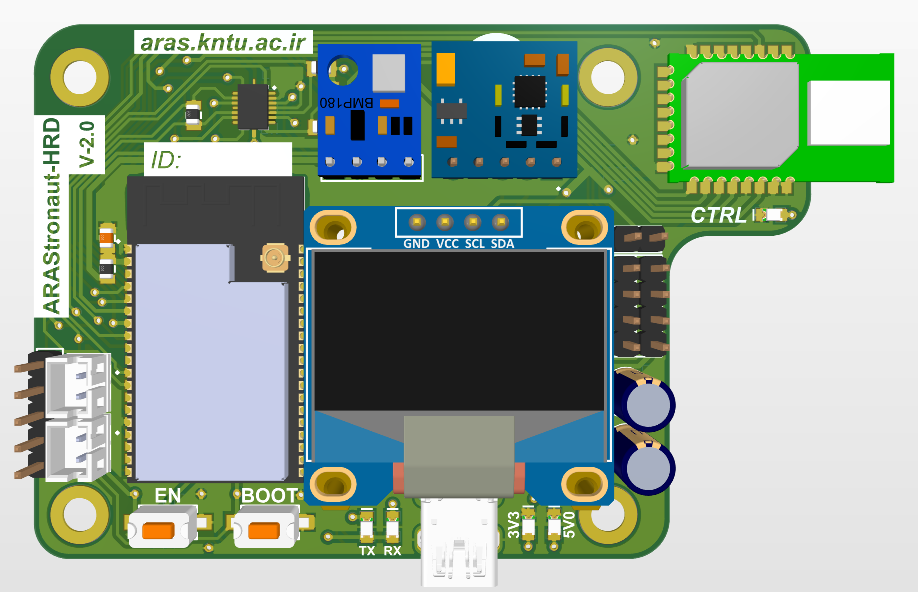
This project focuses on developing a custom module for collecting and visualizing Ultra-Wideband IMU and gyroscope data from an ESP32 microcontroller, utilizing Python, C++, and Node.js. The system features integrated data acquisition, calibration, and real-time plotting capabilities, facilitating efficient analysis of sensor data. Both the hardware and software components are available as an open-source project.
DIAMOND Surgery Robot Calibration
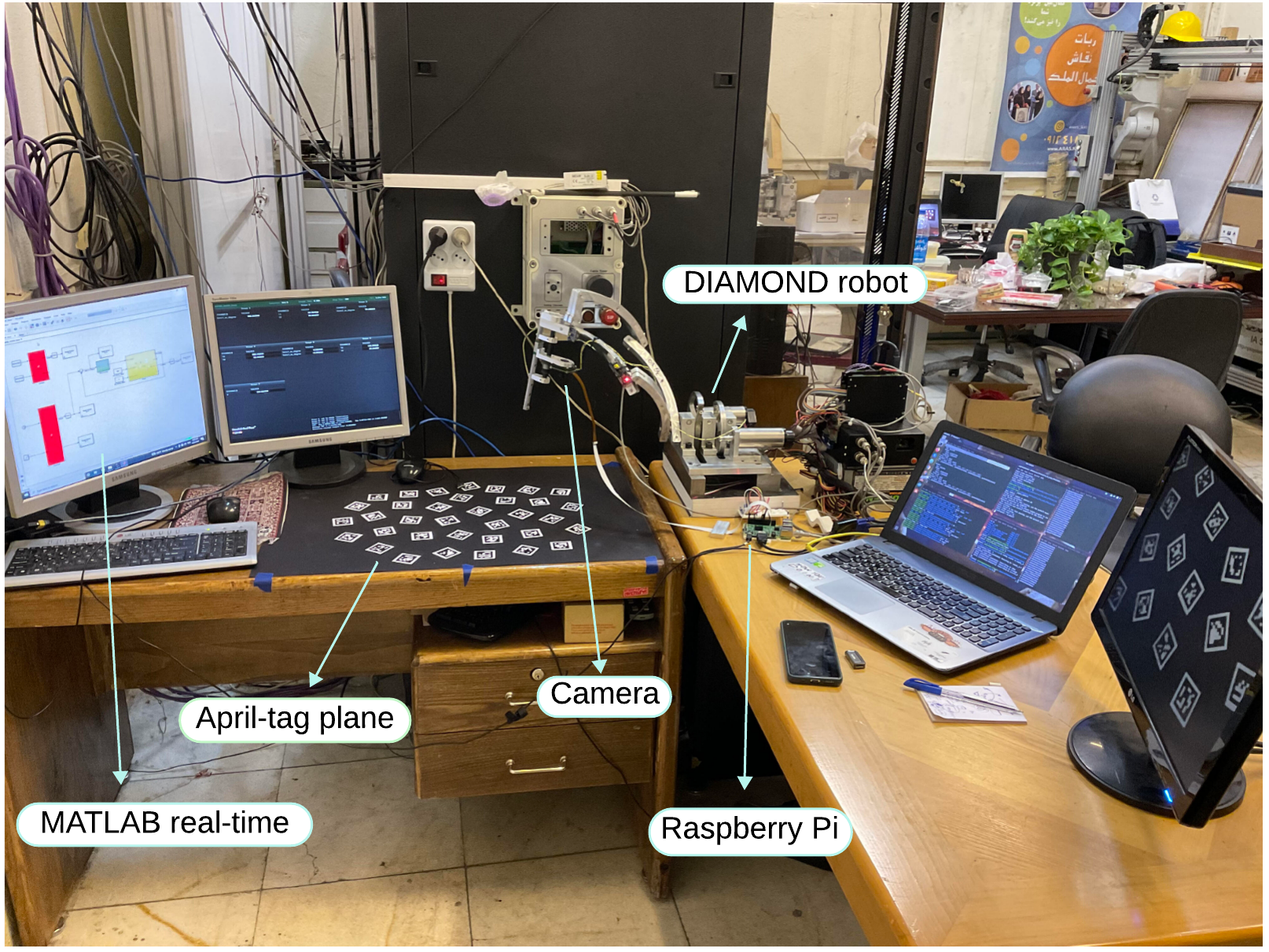
DIAMOND is an eye surgery robot that employs a parallel spherical mechanism to create a Remote Center of Motion (RCM), facilitating minimally invasive surgery (MIS). In this project, we propose a relative pose measurement method calibrate the robot effectively. This work enhances the surgical training accuracy.
ARASH:ASiST Eye Surgery Calibration

This project introduces a novel method for surgical robot calibration using a factor graph framework. The GTSAM library was utilized to construct the factors, while SymForce was employed to derive the Jacobians.
A General Real-Time Data Aquisation System

This work introduces a real-time data acquisition embedded system designed to facilitate unified data transmission between robots, drivers, sensors and MATLAB Simulink. By utilizing the UDP protocol, a connection was established between the RTOS Matlab system and the robot, enabling the implementation of controllers on the robots through Matlab Simulink. This system was implemented on the ARASCam, Kamal-ol-Molk, ARASH:ASiST and DIAMOND robots.
ARAS IR-Tracker
ARAS IR-Tracker is a modular infrared motion capture system for robotic and healthcare applications. It is developed and built at Advanced Robotics and Automation Systems lab at the K.N.Toosi University of Technology in Tehran (link). The system is designed to be modular with each module encapsulating isolated functionalities.
Events